Продам тачскрины - сенсоры для автомагнитол (как штатных, так и остальных) и навигаторов. В наличии около 200 видов сенсоров, различных размеров: - 3,5 дюйма - 4,5 дюйма - 4,7 дюймов - 5 дюймов - 6 дюймов - 6,1 / 6,2 / 6,3 / 6,5 дюймов - 7 дюймов - 8 дюймов Также есть дисплеи для навигаторов. Тачскрин нужно подбирать по размеру родного - ширине и высоте, поэтому размеры, описание и фото сенсоров представлено в каталоге на сайте, указанному в имени. Цены также на сайте. Доставка осуществляется по всей России, первым классом почты (от 140руб.) Способы оплаты различные: на карту / наличкой / яндекс деньги / webmoney / Qiwi / для организаций и ИП также на расчетный счет. Для связи также мыло [email protected] и аська 459-978-662 Раздел: Продам-Отдам, Услуги
Доброго времени суток! Не подскажете, как вычислить кол-во оборотов моторчика, зная ток на который он рассчитан? Заранее огромное спасибо!!!
Раздел: Песочница (Q&A)
Не регулируется яркость и контрастность в телевизоре Mystery MTV-1432 шасси CY-PH1415TOP ver 3.0. Просьба подсказать,на какие выводы TDA11105PS поступают эти регулировки и в каких пределах напряжения. Изображение чуть заметное,насыщенность регулируется, меню яркое и контрастное, регулировки меняются от 0 до 100,но яркость и контрастность не реагируют. Схему прилагаю. Ссылка для скачивания файла:http://cxem.rusfolder.net/files/41769804 Раздел: Песочница (Q&A)
Хотел бы у вас попросить помощи в написании ПО для микроконтроллера который будет управлять модулем SIM900Требуется сделать 2-3 входа при срабатывании которых (допустим изменение сопротивления или КЗ) контроллер формирует смс посылку на записанный в сим карту телефонный номер типа:Внимание сработка входа №1 , и т.д , при нормализации входа посылаться смс типа Вход №1 нормализация.Так же нужна функция дозвона на номер сим900 и про слушка окружающей среды.Вроде все просто но вот с программной частью я как то не очень . Надеюсь на вашу помощь. Раздел: Автоматика
Доброго времени! Цена 500р., Возможен почтовый пересыл за счёт покупателя..., Находится в Саратовской области... Раздел: Продам-Отдам, Услуги
Здравтвуйте, форумчане!
Подскажите - где можно узнать - возможно ли измерения, например, сопротивления в течении одной минуты с мультиметра (М8900) вводитьв компьютер, чтобы потом построить график изменения сопротивления во времени.
Спасибо.
Раздел: Измерительная техника
Уважаемые форумчане! Требутся ваши услуги по разработке простого устройства. Имеется емкость, которая периодически наполняется водой, периодически опустошается. Необходимо разработать устройство, которое будет информировать на расстоянии около 400 метров об опустошении или переполнении ёмкости. На приёмном устройстве должна отображаться следующая информация: индикация питания приёмника, индикация связи с передающим устройством, индикация срабатывания датчиков уровня воды, а также что-то типа компьютерной пищалки для звукового информирования при срабатывании датчиков и при отсутствии сигнала с передающего устройства. Интересует также более информативное представление об уровне жидкости в баке, то есть передача на приёмное устройство не два возможных состояния датчиков, а информацию об уровне воды. Но здесь решающую роль для меня играет стоимость разработки такого устройства. Емкость с водой размещается на улице, отсюда требования к степени защиты передающего устройства соответствующие. Приемник располагается в помещении. Напряжение питания для приёмного и передающего устройства — 220 В. Буду также благодарен любым подсказкам или советам, как можно передать информацию с датчиков уровня на расстояние, так как есть отвертка и паяльник, могу попытаться собрать всё сам. Те, кто предложит сделать готовое устройство, пишите на почту [email protected] или в личку. Желательно со стоимостью. Спасибо. Мск. Раздел: Вакансии и разовая работа
 Пришел мне монитор, не рабочий, Даже не знаю с чего начать поиск неисправности, на чипе написано AMT630, на самой плате MT-43D-PB-V1.4. Схема на фото 1 в 1. Может кто знает где найти схему? Провода проверял обрывов нету, при подаче питания чип становиться теплым. Есть в наличии аналоговый анализатор. Раздел: Телевизоры и мониторы
Рбята куплю 14 реле ТРМП-570 желательно с панельками
Раздел: Куплю
Доброго времени, уважаемые радиолюбители!
Назрел такой вопрос. Сколько времени, проработает от батарейки 23АЕ 12 вольт, к примеру реле с сопротивлением обмотки 400 Ом и током срабатывания 30 мА?
Реле будет постоянно включенным.
Раздел: Песочница (Q&A)
А если в дроссель? Можно ли получить эми?
Раздел: Песочница (Q&A)
Доброго времени суток OV7670 - без буфера... Не как не получается пообщаться с камерой(OV7670). На черное/белое/зеленое/красное/синие один ответ - мусор. Для написания кода я выбрал формат RGB565 и картинку "qcif"(176X144). Для примера использовал это: http://supuntharanga...-ov7660-or.htmlС регистрами http://mbed.org/user...a4ed/ov7670.cppРоспиновка: PA8 - XCLK PB8 - SDIOC PB9 - SDIOD РB7: VSYNC РA4: HSYNC РA6: PCLK РC6: data0 РC7: data1 РC8: data2 РC9: data3 РE4: data4 РB6: data5 РE5: data6 РE6: data7 ВОТ САМ КОД в Keil(Р.S. Если у кого то есть готовый рабочий проект поделитесь. Буду очень благодарен. Может есть еще связь с компом будет просто восхитительно!!!):
#include "stm32f4xx.h"
#include "stm32f4xx_rcc.h"
#include "stm32f4xx_gpio.h"
#include "stm32f4xx_i2c.h"
#include "stm32f4xx_dcmi.h"
#include "stm32f4xx_dma.h"
#include "misc.h"
#include "ov7670reg.h"
#define ONE_BYTE_REG_ADDR 0x01
#define TWO_BYTE_REG_ADDR 0x02
#define ROW 72
#define COLUMNS 80 //I got only 80 columns instead of 88 columns
#define BYTESPERPIX 2
int frame_buffer[19200]; //160*120
int frame_flag=1;
//FOR TEST LED)))
void InitTestLed()
{
GPIO_InitTypeDef gpioConf;
// ????????????? ?????, ????????????? ? ??????
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA, ENABLE);
gpioConf.GPIO_Pin = GPIO_Pin_0;
gpioConf.GPIO_Mode = GPIO_Mode_IN;
GPIO_Init(GPIOA, &gpioConf);
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOD, ENABLE);
// ????????????? ?????, ????????????? ? ??????????
gpioConf.GPIO_Pin = GPIO_Pin_13 | GPIO_Pin_14;
gpioConf.GPIO_Mode = GPIO_Mode_OUT;
gpioConf.GPIO_Speed = GPIO_Speed_100MHz;
gpioConf.GPIO_OType = GPIO_OType_PP;
gpioConf.GPIO_PuPd = GPIO_PuPd_NOPULL;
GPIO_Init(GPIOD, &gpioConf);
}
//FOR DELAY USE STANDART FUNC
void Delay(uint32_t nCount)
{
while(nCount--)
{
}
}
void SHOWIMAGE()
{
int WIDTH=160;
int HEIGHT=120;
int BYTES_PER_PIXEL =2;
int z=0;
int counter1=0;
int counter2=0;
for( z=0;z<ROW*COLUMNS*BYTESPERPIX/4;z++)
{
int i = frame_buffer[4*z+1];
int k=frame_buffer[4*z+3];
int ooo=10;
if(i<70000000)
{
counter1++;
}
else
{
counter2++;
}
if((z+1)%40==0)
{
//new row
}
}
if(counter1<counter2)
{
GPIO_SetBits(GPIOD, GPIO_Pin_13);
}
else
{
GPIO_SetBits(GPIOD, GPIO_Pin_14);
}
}
//-----------------------------
//Function for camera ov7670
//-----------------------------
//PA8 - XCLK// AND TEST WORK FUNCTION!!!
void MCO1_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
//ENABLE CLOCK
RCC_ClockSecuritySystemCmd(ENABLE);
// Enable GPIOs clocks
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA, ENABLE);
// Enable AS MCO
GPIO_PinAFConfig(GPIOA, GPIO_PinSource8, GPIO_AF_MCO);
// Configure MCO (PA8)
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_8;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF;
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP;
GPIO_Init(GPIOA, &GPIO_InitStructure);
//SET divider4 (100/4= 25MHz)(ua => delitel`)
RCC_MCO1Config(RCC_MCO1Source_PLLCLK, RCC_MCO1Div_4);
}
//THIS FUCNCTION TO CONFIGURATION CAMERA(I2C)
//PB8 - SDIOC PB9 - SDIOD
void Hardware_InitI2C(void)
{
GPIO_InitTypeDef GPIO_InitStructure; // this is for the GPIO pins used as I2C1SDA and I2C1SCL
I2C_InitTypeDef I2C_InitStructure; // this is for the I2C1 initilization
// Enable APB1 peripheral clock for I2C1
RCC_APB1PeriphClockCmd(RCC_APB1Periph_I2C1, ENABLE);
// Enable the peripheral clock for the pins used
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOB, ENABLE);
//Set up the I2C1SDA and I2C1SCL pins
GPIO_StructInit(&GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_8 | GPIO_Pin_9; // Pins 10(I2C1_SCL) and 11(I2C1_SDA)
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF; // the pins are configured as alternate function so the USART peripheral has access to them
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_2MHz;// this defines the IO speed and has nothing to do with the baudrate!
GPIO_InitStructure.GPIO_OType = GPIO_OType_OD;// this defines the output type as open drain
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP;// this activates the pullup resistors on the IO pins
GPIO_Init(GPIOB, &GPIO_InitStructure);// now all the values are passed to the GPIO_Init()
//Configurated pins to Alternative FUNCTION
GPIO_PinAFConfig(GPIOB, GPIO_PinSource8, GPIO_AF_I2C1);
GPIO_PinAFConfig(GPIOB, GPIO_PinSource9, GPIO_AF_I2C1);
// Configure I2C1
I2C_StructInit(&I2C_InitStructure);
I2C_DeInit(I2C1);
// Enable the I2C peripheral
I2C_Cmd(I2C1, ENABLE);
//Set the I2C structure parameters
I2C_InitStructure.I2C_Mode = I2C_Mode_I2C;
I2C_InitStructure.I2C_DutyCycle = I2C_DutyCycle_2;
I2C_InitStructure.I2C_OwnAddress1 = 0x00;
I2C_InitStructure.I2C_Ack = I2C_Ack_Enable;
I2C_InitStructure.I2C_AcknowledgedAddress = I2C_AcknowledgedAddress_7bit;
I2C_InitStructure.I2C_ClockSpeed = 100000;
// I2C Peripheral Enable
I2C_ITConfig(I2C1, I2C_IT_ERR, ENABLE);
// Initialize the I2C peripheral
I2C_Init(I2C1,&I2C_InitStructure);
I2C_Cmd(I2C1, ENABLE);
}
//FUNCTION TO SEND DATA FOR CONFIGURATE CAMERA
int i2c_send_data(u8 slave_addr, u16 reg_addr, u8 data, u8 addr_len)
{
int timeout = 0x7FFFFF;
int ret = 0;
//SEND I2C
I2C_GenerateSTART(I2C1, ENABLE);
while( !I2C_CheckEvent(I2C1,I2C_EVENT_MASTER_MODE_SELECT))
{
if ((timeout--) == 0)
{
ret = 1;
goto exit;
}
}
I2C_Send7bitAddress(I2C1, slave_addr, I2C_Direction_Transmitter);
while(!(I2C1->SR1 & (1 << 1))) // check ADDR bit
{
if ((timeout--) == 0)
{
ret = 2;
goto exit;
}
}
while(!(I2C1->SR2 & (1 << 2))) // check TRA bit
{
if ((timeout--) == 0)
{
ret = 3;
goto exit;
}
}
/* 2 byte reg address */
if(addr_len == TWO_BYTE_REG_ADDR)
{
// MSB
I2C_SendData(I2C1, (0xFF & (reg_addr >> 8)) );
while(!(I2C1->SR1 & (1 << 7)))
{
if ((timeout--) == 0)
{
ret = 4;
goto exit;
}
}
// LSB
I2C_SendData(I2C1, (0xFF & reg_addr));
while(!(I2C1->SR1 & (1 << 7)))
{
if ((timeout--) == 0)
{
ret = 5;
goto exit;
}
}
}
/* 1 byte reg address */
else
{
I2C_SendData(I2C1, (0xFF & reg_addr));
while(!(I2C1->SR1 & (1 << 7)))
{
if ((timeout--) == 0)
{
ret = 6;
goto exit;
}
}
}
I2C_SendData(I2C1, data);
while(!I2C_CheckEvent(I2C1,I2C_EVENT_MASTER_BYTE_TRANSMITTED))
{
// if ((timeout--) == 0)
{
ret = 7;
goto exit;
}
}
exit:
I2C_GenerateSTOP(I2C1, ENABLE);
return ret;
}
//FUNCTION TO RECIVE DATE FROM CAMERA
int i2c_receive_data(u8 slave_addr, u16 reg_addr, u8* data, u8 addr_len)
{
int timeout = 0x7FFFFF;
int ret = 0;
/* send i2c*/
while(I2C_GetFlagStatus(I2C1, I2C_FLAG_BUSY));
I2C_GenerateSTART(I2C1, ENABLE);
while(!I2C_CheckEvent(I2C1,I2C_EVENT_MASTER_MODE_SELECT))
{
if ((timeout--) == 0)
{
ret = 1;
goto exit;
}
}
I2C_Send7bitAddress(I2C1, slave_addr, I2C_Direction_Transmitter);
while(!(I2C1->SR1 & (1 << 1))) // check ADDR bit
{
if ((timeout--) == 0)
{
ret = 2;
goto exit;
}
}
while(!(I2C1->SR2 & (1 << 2))) // check TRA bit
{
if ((timeout--) == 0)
{
ret = 3;
goto exit;
}
}
/* 2 byte reg address */
if(addr_len == TWO_BYTE_REG_ADDR)
{
// MSB
I2C_SendData(I2C1, (0xFF & (reg_addr >> 8)) );
while(!(I2C1->SR1 & (1 << 7)))
{
if ((timeout--) == 0)
{
ret = 4;
goto exit;
}
}
// LSB
I2C_SendData(I2C1, (0xFF & reg_addr));
while(!(I2C1->SR1 & (1 << 7)))
{
if ((timeout--) == 0)
{
ret = 5;
goto exit;
}
}
}
/* 1 byte reg address */
else
{
I2C_SendData(I2C1, (0xFF & reg_addr));
while(!(I2C1->SR1 & (1 << 7)))
{
if ((timeout--) == 0)
{
ret = 6;
goto exit;
}
}
}
I2C_GenerateSTOP(I2C1, ENABLE);
I2C_GenerateSTART(I2C1, ENABLE);
while(!I2C_CheckEvent(I2C1,I2C_EVENT_MASTER_MODE_SELECT))
{
if ((timeout--) == 0)
{
ret = 7;
goto exit;
}
}
I2C_Send7bitAddress(I2C1, slave_addr, I2C_Direction_Receiver);
while(!I2C_CheckEvent(I2C1, I2C_EVENT_MASTER_RECEIVER_MODE_SELECTED)) // check ADDR bit
{
if ((timeout--) == 0)
{
ret = 8;
goto exit;
}
}
I2C_AcknowledgeConfig(I2C1, DISABLE);
/* Send STOP Condition */
I2C_GenerateSTOP(I2C1, ENABLE);
while(!I2C_CheckEvent(I2C1, I2C_EVENT_MASTER_BYTE_RECEIVED))
{
if ((timeout--) == 0)
{
ret = 10;
goto exit;
}
}
*data = I2C_ReceiveData(I2C1);
I2C_AcknowledgeConfig(I2C1, ENABLE);
return ret;
exit:
I2C_GenerateSTOP(I2C1, ENABLE);
return ret;
}
////////////////////////////////////////////////////////////////////
//FOR COMFORTING WRITE AND READ FROM CAMERA 2 FUNCTION//////////////
////////////////////////////////////////////////////////////////////
int camera_read_reg(u8 reg, u8* data)
{
return i2c_receive_data(0x42, (u16) reg, data, ONE_BYTE_REG_ADDR);
}
/*******************************************************************************/
int camera_write_reg(u8 reg, u8 data)
{
return i2c_send_data(0x43, (u16) reg, data, ONE_BYTE_REG_ADDR);
}
/////////////////////////////////////////////////////////////////////
/////////////////////////////////////////////////////////////////////
/////////////////////////////////////////////////////////////////////
int WriteReg(int x, int y)
{
int ret = camera_write_reg(x, y);
if(ret < 0)
return ret;
Delay(0xFFFF);
return ret;
}
//FOR CONFIG CAMERA VERY IMPORTANT FUNCTION...DATA FROM IT IN DATASHEET
int camera_config()
{
int ret = 0;
//RESET
ret = WriteReg(0x12, 0x80);
ret = WriteReg(0x12, 0x80);
//
ret = WriteReg(REG_RGB444, 0x00);
ret = WriteReg(REG_COM10, 0x02);
ret = WriteReg(REG_MVFP, 0x27);
ret = WriteReg(REG_CLKRC, 0x80);
ret = WriteReg(DBLV, 0x0a);
ret = WriteReg(REG_COM11, 0x0A);
ret = WriteReg(REG_TSLB, 0x04);
ret = WriteReg(REG_COM13, 0x88);
//RGB565
ret = WriteReg(REG_COM7, 0x04);
ret = WriteReg(REG_RGB444, 0x00);
ret = WriteReg(REG_COM15, 0x10);
ret = WriteReg(REG_COM3, 0x04);
ret = WriteReg(REG_CLKRC, 0x80);
///
ret = WriteReg(0x70, 0x3A);
ret = WriteReg(0x71, 0x35);
ret = WriteReg(0xA2, 0x02);
// 160*120
ret = WriteReg(REG_COM14, 0x1a);
ret = WriteReg(0x72, 0x22);
ret = WriteReg(0x73, 0xf2);
ret = WriteReg(REG_HREF, 0xa4);
ret = WriteReg(REG_HSTART, 0x16);
ret = WriteReg(REG_HSTOP, 0x04);
ret = WriteReg(REG_VREF, 0x0a);
ret = WriteReg(REG_VSTART, 0x02);
ret = WriteReg(REG_VSTOP, 0x7a);
WriteReg(0x7a, 0x20);
WriteReg(0x7b, 0x1c);
WriteReg(0x7c, 0x28);
WriteReg(0x7d, 0x3c);
WriteReg(0x7e, 0x5a);
WriteReg(0x7f, 0x68);
WriteReg(0x80, 0x76);
WriteReg(0x81, 0x80);
WriteReg(0x82, 0x88);
WriteReg(0x83, 0x8f);
WriteReg(0x84, 0x96);
WriteReg(0x85, 0xa3);
WriteReg(0x86, 0xaf);
WriteReg(0x87, 0xc4);
WriteReg(0x88, 0xd7);
WriteReg(0x89, 0xe8);
WriteReg(0x13, 0xe0);
WriteReg(0x00, 0x00);
WriteReg(0x10, 0x00);
WriteReg(0x0d, 0x40);
WriteReg(0x14, 0x18);
WriteReg(0xa5, 0x05);
WriteReg(0xab, 0x07);
WriteReg(0x24, 0x95);
WriteReg(0x25, 0x33);
WriteReg(0x26, 0xe3);
WriteReg(0x9f, 0x78);
WriteReg(0xa0, 0x68);
WriteReg(0xa1, 0x03);
WriteReg(0xa6, 0xd8);
WriteReg(0xa7, 0xd8);
WriteReg(0xa8, 0xf0);
WriteReg(0xa9, 0x90);
WriteReg(0xaa, 0x94);
WriteReg(0x13, 0xe5);
WriteReg(0x0e, 0x61);
WriteReg(0x0f, 0x4b);
WriteReg(0x16, 0x02);
WriteReg(0x21, 0x02);
WriteReg(0x22, 0x91);
WriteReg(0x29, 0x07);
WriteReg(0x33, 0x0b);
WriteReg(0x35, 0x0b);
WriteReg(0x37, 0x1d);
WriteReg(0x38, 0x71);
WriteReg(0x39, 0x2a);
WriteReg(0x3c, 0x78);
WriteReg(0x4d, 0x40);
WriteReg(0x4e, 0x20);
WriteReg(0x69, 0x00);
WriteReg(0x74, 0x10);
WriteReg(0x8d, 0x4f);
WriteReg(0x8e, 0x00);
WriteReg(0x8f, 0x00);
WriteReg(0x90, 0x00);
WriteReg(0x91, 0x00);
WriteReg(0x92, 0x00);
WriteReg(0x96, 0x00);
WriteReg(0x9a, 0x80);
WriteReg(0xb0, 0x84);
WriteReg(0xb1, 0x0c);
WriteReg(0xb2, 0x0e);
WriteReg(0xb3, 0x82);
WriteReg(0xb8, 0x0a);
WriteReg(0x43, 0x0a);
WriteReg(0x44, 0xf0);
WriteReg(0x45, 0x34);
WriteReg(0x46, 0x58);
WriteReg(0x47, 0x28);
WriteReg(0x48, 0x3a);
WriteReg(0x59, 0x88);
WriteReg(0x5a, 0x88);
WriteReg(0x5b, 0x44);
WriteReg(0x5c, 0x67);
WriteReg(0x5d, 0x49);
WriteReg(0x5e, 0x0e);
WriteReg(0x64, 0x04);
WriteReg(0x65, 0x20);
WriteReg(0x66, 0x05);
WriteReg(0x94, 0x04);
WriteReg(0x95, 0x08);
WriteReg(0x6c, 0x0a);
WriteReg(0x6d, 0x55);
WriteReg(0x6e, 0x11);
WriteReg(0x6f, 0x9f);
WriteReg(0x6a, 0x40);
WriteReg(0x01, 0x40);
WriteReg(0x02, 0x40);
WriteReg(0x13, 0xe7);
WriteReg(0x15, 0x02);
WriteReg(0x4f, 0x80);
WriteReg(0x50, 0x80);
WriteReg(0x51, 0x00);
WriteReg(0x52, 0x22);
WriteReg(0x53, 0x5e);
WriteReg(0x54, 0x80);
WriteReg(0x58, 0x9e);
WriteReg(0x41, 0x08);
WriteReg(0x3f, 0x00);
WriteReg(0x75, 0x05);
WriteReg(0x76, 0xe1);
WriteReg(0x4c, 0x00);
WriteReg(0x77, 0x01);
WriteReg(0x3d, 0xc1);
WriteReg(0x4b, 0x09);
WriteReg(0xc9, 0x60);
WriteReg(0x41, 0x38);
WriteReg(0x56, 0x40);
WriteReg(0x34, 0x11);
WriteReg(0x3b, 0x02);
WriteReg(0xa4, 0x88);
WriteReg(0x96, 0x00);
WriteReg(0x97, 0x30);
WriteReg(0x98, 0x20);
WriteReg(0x99, 0x30);
WriteReg(0x9a, 0x84);
WriteReg(0x9b, 0x29);
WriteReg(0x9c, 0x03);
WriteReg(0x9d, 0x4c);
WriteReg(0x9e, 0x3f);
WriteReg(0x78, 0x04);
WriteReg(0x79, 0x01);
WriteReg(0xc8, 0xf0);
WriteReg(0x79, 0x0f);
WriteReg(0xc8, 0x00);
WriteReg(0x79, 0x10);
WriteReg(0xc8, 0x7e);
WriteReg(0x79, 0x0a);
WriteReg(0xc8, 0x80);
WriteReg(0x79, 0x0b);
WriteReg(0xc8, 0x01);
WriteReg(0x79, 0x0c);
WriteReg(0xc8, 0x0f);
WriteReg(0x79, 0x0d);
WriteReg(0xc8, 0x20);
WriteReg(0x79, 0x09);
WriteReg(0xc8, 0x80);
WriteReg(0x79, 0x02);
WriteReg(0xc8, 0xc0);
WriteReg(0x79, 0x03);
WriteReg(0xc8, 0x40);
WriteReg(0x79, 0x05);
WriteReg(0xc8, 0x30);
WriteReg(0x79, 0x26);
WriteReg(0x09, 0x03);
WriteReg(0x3b, 0x42);
WriteReg(0xff, 0xff); /* END MARKER */
return ret;
}
//////////////////////////////////
//////////////////////////////////
//OTHER CONNECT
/* B7: VSYNC*/
/* A4: HSYNC*/
/* A6: PCLK*/
/* C6: data0*/
/* C7: data1*/
/* C8: data2*/
/* C9: data3*/
/* E4: data4*/
/* B6: data5*/
/* E5: data6*/
/* E6: data7*/
///////////////////////////////////
void DCMI_Configure(void)
{
DCMI_InitTypeDef DCMI_InitStructure;
DMA_InitTypeDef DMA_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
GPIO_InitTypeDef GPIO_InitStructure;
/* GPIOD Periph clock enable */
RCC_AHB2PeriphClockCmd(RCC_AHB2Periph_DCMI, ENABLE);
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA, ENABLE);
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOB, ENABLE);
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOC, ENABLE);
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOD, ENABLE);
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOE, ENABLE);
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_DMA2, ENABLE);
/* Configure PD12, PD13, PD14 and PD15 in output pushpull mode */
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_12 | GPIO_Pin_13| GPIO_Pin_14| GPIO_Pin_15;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_OUT;
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz;
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_NOPULL;
GPIO_Init(GPIOD, &GPIO_InitStructure);
/* B7: VSYNC*/
GPIO_PinAFConfig(GPIOB, GPIO_PinSource7, GPIO_AF_DCMI);
/* A4: HSYNC*/
GPIO_PinAFConfig(GPIOA, GPIO_PinSource4, GPIO_AF_DCMI);
/* A6: PCLK*/
GPIO_PinAFConfig(GPIOA, GPIO_PinSource6, GPIO_AF_DCMI);
/* C6: data0*/
GPIO_PinAFConfig(GPIOC, GPIO_PinSource6, GPIO_AF_DCMI);
/* C7: data1*/
GPIO_PinAFConfig(GPIOC, GPIO_PinSource7, GPIO_AF_DCMI);
/* C8: data2*/
GPIO_PinAFConfig(GPIOC, GPIO_PinSource8, GPIO_AF_DCMI);
/* C9: data3*/
GPIO_PinAFConfig(GPIOC, GPIO_PinSource9, GPIO_AF_DCMI);
/* E4: data4*/
GPIO_PinAFConfig(GPIOE, GPIO_PinSource4, GPIO_AF_DCMI);
/* B6: data5*/
GPIO_PinAFConfig(GPIOB, GPIO_PinSource6, GPIO_AF_DCMI);
/* E5: data6*/
GPIO_PinAFConfig(GPIOE, GPIO_PinSource5, GPIO_AF_DCMI);
/* E6: data7*/
GPIO_PinAFConfig(GPIOE, GPIO_PinSource6, GPIO_AF_DCMI);
/* DCMI GPIO configuration */
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_4;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz;
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP ;
GPIO_Init(GPIOA, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz;
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;
GPIO_Init(GPIOA, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6 | GPIO_Pin_7;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz;
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP ;
GPIO_Init(GPIOB, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6 | GPIO_Pin_7 | GPIO_Pin_8 | GPIO_Pin_9;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz;
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP ;
GPIO_Init(GPIOC, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_4 | GPIO_Pin_5 | GPIO_Pin_6;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz;
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP ;
GPIO_Init(GPIOE, &GPIO_InitStructure);
/* DCMI configuration */
DCMI_InitStructure.DCMI_CaptureMode = DCMI_CaptureMode_SnapShot;
DCMI_InitStructure.DCMI_ExtendedDataMode = DCMI_ExtendedDataMode_8b;
DCMI_InitStructure.DCMI_CaptureRate = DCMI_CaptureRate_All_Frame;
DCMI_InitStructure.DCMI_VSPolarity = DCMI_VSPolarity_High;
DCMI_InitStructure.DCMI_HSPolarity = DCMI_HSPolarity_Low;
DCMI_InitStructure.DCMI_PCKPolarity = DCMI_PCKPolarity_Rising;
DCMI_InitStructure.DCMI_SynchroMode = DCMI_SynchroMode_Hardware;
DCMI_Init(&DCMI_InitStructure);
//DCMI_ITConfig(DCMI_IT_VSYNC, ENABLE);
//DCMI_ITConfig(DCMI_IT_LINE, ENABLE);
//DCMI_ITConfig(DCMI_IT_FRAME, ENABLE);
//DCMI_ITConfig(DCMI_IT_OVF, ENABLE);
//DCMI_ITConfig(DCMI_IT_ERR, ENABLE);
/* Configures the DMA2 to transfer Data from DCMI */
/* DMA2 Stream1 Configuration */
DMA_DeInit(DMA2_Stream1);
DMA_StructInit(&DMA_InitStructure);
DMA_InitStructure.DMA_Channel = DMA_Channel_1;
DMA_InitStructure.DMA_PeripheralBaseAddr = (uint32_t)(&DCMI->DR);
DMA_InitStructure.DMA_Memory0BaseAddr = (uint32_t)frame_buffer;
DMA_InitStructure.DMA_DIR = DMA_DIR_PeripheralToMemory;
DMA_InitStructure.DMA_BufferSize = ROW*COLUMNS*BYTESPERPIX/4;/* size of image in bytes/4 */
DMA_InitStructure.DMA_PeripheralInc = DMA_PeripheralInc_Disable;
DMA_InitStructure.DMA_MemoryInc = DMA_MemoryInc_Enable;
DMA_InitStructure.DMA_PeripheralDataSize = DMA_PeripheralDataSize_Word;
DMA_InitStructure.DMA_MemoryDataSize = DMA_MemoryDataSize_Word;
DMA_InitStructure.DMA_Mode = DMA_Mode_Circular;
DMA_InitStructure.DMA_Priority = DMA_Priority_VeryHigh;
DMA_InitStructure.DMA_FIFOMode = DMA_FIFOMode_Enable;
DMA_InitStructure.DMA_FIFOThreshold = DMA_FIFOThreshold_Full;
DMA_InitStructure.DMA_MemoryBurst = DMA_MemoryBurst_Single;
DMA_InitStructure.DMA_PeripheralBurst = DMA_PeripheralBurst_Single;
DMA_Init(DMA2_Stream1, &DMA_InitStructure);
DMA_ITConfig(DMA2_Stream1, DMA_IT_TC, ENABLE);
DMA_ITConfig(DMA2_Stream1, DMA_IT_TE, ENABLE);
/* DMA2 IRQ channel Configuration */
NVIC_InitStructure.NVIC_IRQChannel = DMA2_Stream1_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_1);
NVIC_InitStructure.NVIC_IRQChannel = DCMI_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 2;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 2;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
DMA_Cmd(DMA2_Stream1, ENABLE);
DCMI_Cmd(ENABLE);
DCMI_CaptureCmd(ENABLE);
}
void DMA2_Stream1_IRQHandler(void)
{
static int K;
//Test on DMA2 Channel1 Transfer Complete interrupt
if(DMA_GetITStatus(DMA2_Stream1,DMA_IT_TCIF1) == SET)
{
frame_flag = 1;//when frame_flag =1,all the data will be send through serial port in main function while loop
DMA_ClearITPendingBit(DMA2_Stream1,DMA_IT_TCIF1);
}
if(DMA_GetITStatus(DMA2_Stream1,DMA_IT_TEIF1) == SET)
{
DMA_ClearITPendingBit(DMA2_Stream1,DMA_IT_TEIF1);
}
}
void DCMI_IRQHandler(void)
{
static volatile int line,col,i,j = 0;
if(DCMI_GetFlagStatus(DCMI_FLAG_FRAMERI) == SET)
{
DCMI_ClearFlag(DCMI_FLAG_FRAMERI);
}
if(DCMI_GetFlagStatus(DCMI_FLAG_OVFRI) == SET)
{
DCMI_ClearFlag(DCMI_FLAG_OVFRI);
}
}
int main(void)
{
MCO1_Init();
Hardware_InitI2C();
camera_config();
DCMI_Configure();
while (1)
{
if( frame_flag == 1)
{
SHOWIMAGE();
frame_flag = 0;
}
}
}
Раздел: STM32
Проблема с логическим контроллером в приточной установке.
Перестала работать установка, смотрели специалисты, ставили перемычки в обход контроллера, приточка работает. Контроллер Freemax mx-s2. Можно ли его заменить на какой то другой?
Раздел: Песочница (Q&A)
Куплю на Митино из Вашего предложения, не дорого
К53-20-32В-33мкФ 10% 100шт
К50-29 25В-2200МКФ пр.5 от 90г 170шт
Наличие, мин. цена?
Раздел: Продам-Отдам, Услуги
Всем привет! Имеется ноутбук sony vgn-ar61mr. Ноут после неудачной прошивки перестал включаться. Вопрос: Можно ли на данной модели какими нибудь перемычками запустить режим прошивки или только выпаиванием flash и через программатор?
Раздел: Компьютерная техника
Здрасьте!
Скажите можно ли запустить эл.двиг компрессора от советского холодильника с помощью конденсатора?
И если можно то какой следует использовать и как подобрать его емкость?
Раздел: Песочница (Q&A)
Все привет,как проверить работает ли он? Раздел: Световые эффекты и LED
Раз, через раз нет картинки через выход видеокарты.
Некоторые заведомо рабочие видеокарты вообще не придают признаков жизни.
В чем может быть проблема ?
Может ли быть, что проблема в конденсаторах (есть парочка подозрительных) ?
Раздел: Компьютерная техника
Намотал трансформатор , но вот беда . При подключении его в сеть автоматы выбивает и не имеет значения с какой стороны подключить . Я так понимаю межвитковое , трансу ппц , необходимо перематывать...Или я ошибаюсь ?
Раздел: Песочница (Q&A)
Вот схема, по которой собираюсь сделать БП. В основе торроидальный трасформатор с выходами +-18в. Какие посоветуете номиналы конденсаторов C1 С2, у меня имеются кондеры на 50в 5000мкф, можно ли их запараллелить, чтобы вышло 50в 10000мкф в плечо? БП планирую использовать для усилка на тда7294. Если есть какие-либо дополнения к этой схеме, для улучшения характеристик, прошу написать. Всем заранее спасибо 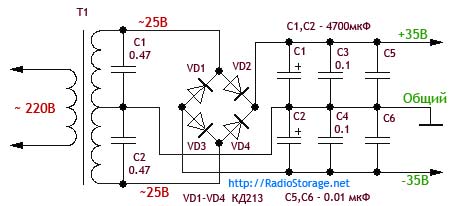 Раздел: Песочница (Q&A)
Как рассчитать токи и падения напряжений на резисторах внутри гибридной микросхемы при этом подключив не все выводы микросхемы. Могу лишь включить эмуляцию питания (12в). вот схема.И ПРИКРЕПЛЯЮ САМ ФАЙЛ МУЛЬТИСИМ. Раздел: Песочница (Q&A)
Можно так делать ?
Раздел: Ламповая техника
по теме
Раздел: Ламповая техника
 Серии твердотельных накопителей Plextor M6S и M6e построены на контроллерах Marvell серверного уровня и передовой переключаемой памяти Toshiba NAND A19, задействуют ОЗУ для ускорения своих операций, обеспечивают постоянную производительность во время всего срока службы соответственно 520 и 770 Мбайт/с при последовательном чтении и снабжаются 3- и 5-летней гарантией 
[next-page][/next-page]
|


 Продам Тачскрины Для Автомагнитол
Продам Тачскрины Для Автомагнитол